3. 系統(tǒng)構(gòu)成
主軸電動機(jī)的控制有兩種接口;模擬和數(shù)字(串行傳送)輸出。模擬接口需用其他公司的變頻器及電動機(jī)。
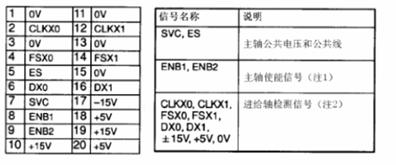
(1) 模擬主軸接口
模擬主軸的接口定義如圖所示:
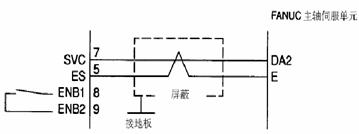
模擬主軸的連接如圖所示:
(2) 串行主軸接口
串行主軸的接口定義如圖所示:
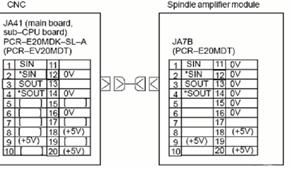
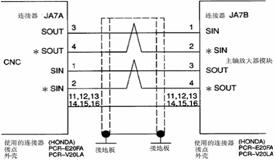
串行主軸的連接如圖所示:
4. 數(shù)字伺服
伺服的連接分A型和B型,由伺服放大器上的一個短接棒控制。A型連接是將位置反饋線接到cNc系統(tǒng),B型連接是將其接到伺服放大器。0i和近期開發(fā)的系統(tǒng)用B型。o系統(tǒng)大多數(shù)用A型。兩種接法不能任意使用,與伺服軟件有關(guān)。連接時最后的放大器JxlB需插上FANUC (提供的短接插頭,如果遺忘會出現(xiàn)#401報警.另外,薦選用一個伺服放大器控制兩個電動機(jī),應(yīng)將大電動機(jī)電摳接在M端子上,小電動機(jī)接在L端子上.否則電動機(jī)運(yùn)行時會聽到不正常的嗡聲。
三、FANUC系統(tǒng)參數(shù)
參數(shù)在NC系統(tǒng)中用設(shè)定NC數(shù)控機(jī)床及輔助設(shè)備的規(guī)格和內(nèi)容,及加工操作所必需的一些數(shù)據(jù)。機(jī)床廠家在制造機(jī)床、最終用戶在使用過程中,通過參數(shù)的設(shè)定,來實(shí)現(xiàn)對伺服驅(qū)動、加工條件、機(jī)床坐標(biāo)、操作功能、數(shù)據(jù)傳輸?shù)确矫娴脑O(shè)定和調(diào)用。
機(jī)床廠商、用戶在配備、使用FANUC系統(tǒng)時,根據(jù)具體的使用狀況,有大量的參數(shù)需要調(diào)整和設(shè)置。在使用和調(diào)整這些參數(shù)是有必要搞清楚這些參數(shù)的用途和設(shè)置方法。在下文中介紹一些有關(guān)FANUC系統(tǒng)參數(shù)的常識和一些常用參數(shù)。
表 FANUC系統(tǒng)參數(shù)類型列表
(一)FANUC系統(tǒng)參數(shù)分類
按照數(shù)據(jù)形式參數(shù)可以分為下表所表示的類別:
1、對于位型和位軸型參數(shù),每個數(shù)據(jù)號由8位組成,每一位有不同的意義。
2、軸型參數(shù)允許參數(shù)分別設(shè)定給每個控制軸。
3、每個數(shù)據(jù)類型有一個通用的有效范圍,參數(shù)不同其數(shù)據(jù)范圍也不同。
為了進(jìn)一步說明這兩類數(shù)據(jù)在數(shù)據(jù)設(shè)定方面的區(qū)別,特舉如下兩個例子:
1、位型和位軸型參數(shù)舉例#p#分頁標(biāo)題#e#
通過該例可以知道位型和位軸型的數(shù)據(jù)格式,它們都是每一個數(shù)據(jù)號由0~7位數(shù)據(jù)組成。在描述這一類數(shù)據(jù)時可以用這樣的格式來說明:數(shù)據(jù)號.位號。比如上例中的ISO參數(shù)就可以用這樣的符號來表示:1000.1。1000.1=0時表示數(shù)據(jù)采用EIA碼輸出,1000.1=1時表示數(shù)據(jù)輸出采用ISO碼。位型和位軸型數(shù)據(jù)就是用這樣的方式來設(shè)定不同的系統(tǒng)功能。
2、位型和位軸型以外的數(shù)據(jù)
FANUC系統(tǒng)將常用的參數(shù)例如:通訊、鏡像、I/O口的選擇等常見參數(shù)放置在SETTING功能鍵下,以便于用戶使用。其他大量的參數(shù)歸類于SYSTEM功能鍵下的參數(shù)菜單。這一點(diǎn)和西門子將參數(shù)分為機(jī)床參數(shù)和設(shè)定參數(shù)有點(diǎn)類似。
下面介紹一些常用的系統(tǒng)參數(shù):
1、與各軸的控制和設(shè)定單位相關(guān)的參數(shù):參數(shù)號1001~1023;
這一類參數(shù)主要用于設(shè)定各軸的移動單位、各軸的控制方式、伺服軸的設(shè)定、各軸的運(yùn)動方式等等。
2、與機(jī)床坐標(biāo)系的設(shè)定、參考點(diǎn)、原點(diǎn)等相關(guān)的參數(shù):參數(shù)號1201~1280;
這一類參數(shù)主要用于設(shè)定機(jī)床的坐標(biāo)系的設(shè)定,原點(diǎn)的偏移、工件坐標(biāo)系的擴(kuò)展等等。
3、與存儲行程檢查相關(guān)的參數(shù):參數(shù)號:1300~1327;
這一類參數(shù)的設(shè)定主要是用于各軸保護(hù)區(qū)域的設(shè)定等等。
4、與設(shè)定機(jī)床各軸進(jìn)給、快速移動速度、手動速度等相關(guān)的參數(shù):參數(shù)號:1401~1465;
這一類參數(shù)涉及機(jī)床各軸在各種移動方式、模式下的移動速度的設(shè)定,包括快移極限速度、進(jìn)給極限速度、手動移動速度的設(shè)定等等。
5、與加減速控制相關(guān)的參數(shù):參數(shù)好:1601~1785;
這一類參數(shù)用于設(shè)定各種插補(bǔ)方式下的啟動停止時的加減速的方式,以及在程序路徑發(fā)生變化時(如出現(xiàn)轉(zhuǎn)角、過渡等)進(jìn)給速度的變化。
6、與程序編制相關(guān)的參數(shù):參數(shù)號:3401~3460;
用于設(shè)置編程時的數(shù)據(jù)格式,設(shè)置使用的G指令格式、設(shè)置系統(tǒng)缺省的有效指令模態(tài)等等和程序編制有關(guān)的狀態(tài)。
7、與螺距誤差補(bǔ)償相關(guān)的參數(shù):參數(shù)號:3620~3627;
我們知道,數(shù)控機(jī)床具有對螺距誤差進(jìn)行電氣補(bǔ)償?shù)墓δ堋T谑褂眠@樣的功能時,系統(tǒng)要求對補(bǔ)償?shù)姆绞健⒀a(bǔ)償?shù)狞c(diǎn)數(shù)、補(bǔ)償?shù)钠鹗嘉恢谩⒀a(bǔ)償?shù)拈g隔等等參數(shù)進(jìn)行設(shè)置。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF