1、引言
為了配合“機(jī)械設(shè)備自動化”國家級試點專業(yè)建設(shè),我校于1996年提出了建立FMS實驗系統(tǒng)的構(gòu)想,并付諸實施。系統(tǒng)方案既遵循FMS的一般體系結(jié)構(gòu),又充分考慮到教學(xué)實驗的特點。在系統(tǒng)的實施過程中,我們自行研制開發(fā)了FMS運行控制軟件,該系統(tǒng)具有實時調(diào)度、仿真動畫、設(shè)備監(jiān)控等功能。
2、FMS系統(tǒng)布局
系統(tǒng)布局如圖1所示,F(xiàn)MS實驗系統(tǒng)由數(shù)控車床、數(shù)控加工中心、搬運機(jī)械手和四臺工控機(jī)組成。數(shù)控車床CK6150適用于回轉(zhuǎn)體零件的精加工。數(shù)控加工中心XH714具有三軸聯(lián)動控制,工件一次裝夾后可自動完成銑、鏜、鉸等工序的加工。機(jī)械手可在直線導(dǎo)軌上行走,手臂有四個自由度,前端帶有手爪,完成工件的輸送、搬運。
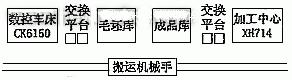
圖1 系統(tǒng)布局
三臺486工控機(jī)分別作為車床、加工中心和機(jī)械手等設(shè)備的控制工作站,上位機(jī)(586工控機(jī))和三臺工作站通過BITBUS現(xiàn)場總線互聯(lián),實現(xiàn)系統(tǒng)的集成。
3、系統(tǒng)功能需求
運控軟件運行于上位機(jī),包含以下主要功能:
(1) 實時調(diào)度控制
依據(jù)作業(yè)計劃、零件加工工藝路線以及生產(chǎn)現(xiàn)場的設(shè)備狀態(tài),對搬運機(jī)械手進(jìn)行動態(tài)實時調(diào)度,實現(xiàn)工件的合理流動,同時協(xié)調(diào)機(jī)械手及所有被服務(wù)設(shè)備之間的工作。
(2) 仿真動畫
利用直觀的動態(tài)圖形方式,一方面在運行前對生產(chǎn)過程進(jìn)行模擬,分析調(diào)度控制策略的可行性及系統(tǒng)中物流的走向;另一方面可對系統(tǒng)實際運行進(jìn)行在線監(jiān)控,對物流阻塞和設(shè)備故障等異常情況及時發(fā)現(xiàn),提高系統(tǒng)的可靠性。
(3) 輔助功能
除上述兩個基本功能之外,系統(tǒng)尚需提供作業(yè)計劃管理、數(shù)控程序管理、庫管理等輔助性功能。
4、調(diào)度控制系統(tǒng)設(shè)計
4.1 運控軟件與下位工作站的接口
BITBUS網(wǎng)絡(luò)物理層采用EIA-RS485規(guī)范,數(shù)據(jù)鏈路層基于IBM同步鏈路控制(SDLC)協(xié)議,應(yīng)用層提供遠(yuǎn)程訪問與控制(RAC)服務(wù)。籍此,上位機(jī)可完成對總線節(jié)點上的片內(nèi)、片外數(shù)據(jù)存儲器的讀寫,任務(wù)的調(diào)度和位總線消息的收發(fā)。
FMS實驗系統(tǒng)采用分布式控制模式,每個現(xiàn)場設(shè)備完全由相應(yīng)的下位工作站控制,上位機(jī)通過BITBUS網(wǎng)絡(luò)與各下位工作站進(jìn)行命令、狀態(tài)和數(shù)據(jù)信息的通信,從而實現(xiàn)對現(xiàn)場設(shè)備的間接控制。上位機(jī)指揮設(shè)備動作時(如加工中心夾具松開),將“控制命令”寫入相應(yīng)設(shè)備工作站節(jié)點上的片外數(shù)據(jù)存儲器。設(shè)備工作站定時掃描該區(qū)域,發(fā)現(xiàn)有效命令即加以處理,并將響應(yīng)執(zhí)行情況回寫,供上位機(jī)讀取。命令控制塊結(jié)構(gòu)如下:
300H:命令有效標(biāo)志
301H:命令代碼
302H-306H:命令參數(shù)
307H:命令響應(yīng)(上位機(jī)置FFH,由下位機(jī)回寫命令響應(yīng)情況)。
02H-0AH:命令失敗
01H:命令正在執(zhí)行
55H:命令已完成
4.2 調(diào)度控制基本策略
根據(jù)FMS是實驗系統(tǒng)布局及功能需求,將調(diào)度控制劃分為任務(wù)調(diào)度和設(shè)備控制兩個層次。任務(wù)調(diào)度層定義了一組基本運輸任務(wù)。每個任務(wù)實際上是一組設(shè)備控制命令序列,圖2給出了“取毛坯送加工中心加工”任務(wù),這些命令只能串行、順序、連貫地執(zhí)行。
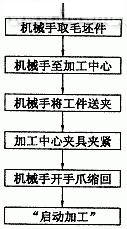
圖2 取毛坯送加工中心加工
任務(wù)調(diào)度層依據(jù)現(xiàn)場設(shè)備狀態(tài)、作業(yè)計劃及一組規(guī)則來安排運輸任務(wù)的執(zhí)行次序,以滿足系統(tǒng)的動態(tài)、實時要求。調(diào)度的基本目標(biāo)是提高機(jī)床的利用率。運輸機(jī)械手是物流系統(tǒng)的瓶頸設(shè)備、臨界資源,系統(tǒng)為每個任務(wù)設(shè)置一個優(yōu)先數(shù),以仲裁多個任務(wù)對機(jī)械手的競爭。任務(wù)優(yōu)先數(shù)的計算依照任務(wù)的性質(zhì)、任務(wù)對應(yīng)零件在作業(yè)單中的加工優(yōu)先級以及機(jī)械手位置。 #p#分頁標(biāo)題#e#
調(diào)度層每選中一個任務(wù)后,即交給設(shè)備控制層處理。設(shè)備控制層依次逐個解釋執(zhí)行序列中的設(shè)備控制命令。設(shè)備控制采用異步的命令/響應(yīng)方式,即上位機(jī)向下位工作站發(fā)送控制命令后,即轉(zhuǎn)去處理其它事務(wù),而由時鐘中斷定時查詢工作站在命令開始執(zhí)行及完成后發(fā)出的相應(yīng)回答。
值得注意的是,機(jī)床加工是一系列命令,包括NC程序下裝、安全門關(guān)閉、正式加工及加工完成后安全門的打開。而實際上,在“取毛坯送加工中心”任務(wù)中,機(jī)械手手爪縮回后,機(jī)械手已經(jīng)可以執(zhí)行其它運輸任務(wù)。如果讓機(jī)械手“空等”這些命令的執(zhí)行完成,顯然是不合適的。合理的方法應(yīng)是在保證系統(tǒng)安全的前提下,充分提高設(shè)備的并行程度,即一方面機(jī)械手手爪縮回后,機(jī)床加工馬上開始啟動,另一方面又要盡快把機(jī)械手“解脫”出來。具體設(shè)計中,將“啟動加工”歸結(jié)為填一個加工控制命令表,機(jī)械手手爪縮回后馬上可服務(wù)于其它任務(wù),后續(xù)動作由其它程序根據(jù)這個控制命令表處理。
4.3 仿真動畫設(shè)計
考慮到仿真動畫運行的實時性要求以及與調(diào)度控制的并行性,系統(tǒng)的仿真動畫在定時中斷中實現(xiàn)。在動畫處理模塊中定義一組動畫“動作”,對應(yīng)與現(xiàn)場設(shè)備(主要是搬運機(jī)械手)的運行,設(shè)備控制層向下位工作站發(fā)送控制命令并得到響應(yīng)時,或在運行中捕捉到設(shè)備異常時,即向動畫處理模塊發(fā)送一個動作命令,啟動并保持畫面上“設(shè)備”與現(xiàn)場設(shè)備同步運行。
動畫實現(xiàn)主要利用屏幕象素的塊復(fù)制和塊恢復(fù)技術(shù),而對復(fù)雜的動作如機(jī)械手手臂的翻轉(zhuǎn)等,筆者借用了幀動畫的有關(guān)概念,先建立許多幀局部圖片存入緩沖區(qū)中,需要時將這些圖片以適當(dāng)?shù)乃俾屎晚樞颍胺烹娪啊卑愕囊灰伙@示到屏幕上某一區(qū)域,產(chǎn)生相對復(fù)雜、精致的動畫效果。圖片可以利用“畫筆”等圖形軟件制作,以BMP格式保存在文件中,由程序讀出存入緩沖區(qū)。考慮到這些圖片需占用較大的內(nèi)存,系統(tǒng)將圖片緩沖區(qū)置于擴(kuò)展內(nèi)存。
4.4 軟件結(jié)構(gòu)
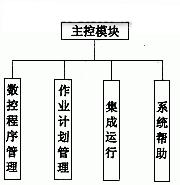
圖3 總體結(jié)構(gòu)
調(diào)度控制系統(tǒng)軟件的總體結(jié)構(gòu)如圖3所示。數(shù)控程序管理模塊實現(xiàn)數(shù)控程序的編輯、語法檢查。作業(yè)計劃管理模塊完成作業(yè)計劃、零件工藝路線的編輯,并以文件的形式保存。集成運行模塊是整個系統(tǒng)的核心,圖4給出了該模塊的層次結(jié)構(gòu)。
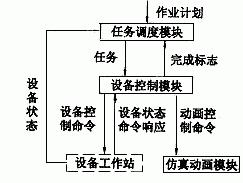
圖4 集成運行模塊層次結(jié)構(gòu)
5、結(jié)束語
本文工作是基于實驗型的FMS系統(tǒng)。經(jīng)測試表明,運行控制系統(tǒng)在實際運行中安全、可靠,工件流動合理,達(dá)到了設(shè)計要求。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF