本文探討研究了在COSMOSMotion中的裝載機(jī)工作裝置仿真分析。
輪式裝載機(jī)工作裝置是帶有液壓缸的空間多桿機(jī)構(gòu),工作裝置設(shè)計(jì)水平的高低直接影響裝載機(jī)作業(yè)的性能,進(jìn)而影響整機(jī)工作效率。過去基本沿用類比法進(jìn)行設(shè)計(jì),工作煩瑣、設(shè)計(jì)精度低、周期長(zhǎng),且不易獲得各項(xiàng)性能指標(biāo)都比較滿意的方案。因此裝載機(jī)的開發(fā)通常需要用物理樣機(jī)來評(píng)價(jià)整機(jī)的綜合性能,樣機(jī)只能在開發(fā)后期制造裝配,不能參與產(chǎn)品的早期開發(fā)評(píng)價(jià)過程,且物理樣機(jī)生成周期長(zhǎng)、成本高、修改困難。本文用SolidWorks軟件建立裝載機(jī)工作裝置的虛擬樣機(jī)模型,用COSMOSMotion軟件對(duì)其進(jìn)行仿真分析,有效地避免了物理樣機(jī)開發(fā)模式存在的缺陷,使裝載機(jī)工作裝置的性能評(píng)價(jià)可在設(shè)計(jì)過程中完成,在制造之前發(fā)現(xiàn)并更正設(shè)計(jì)錯(cuò)誤,完善設(shè)計(jì)方案,縮短了產(chǎn)品的開發(fā)周期,提高了設(shè)計(jì)質(zhì)量。
1工作裝置的建模與仿真。
1.1三維建模
裝載機(jī)工作裝置由鏟斗、動(dòng)臂、搖臂、拉桿、前車架、轉(zhuǎn)斗油缸缸筒、轉(zhuǎn)斗油缸活塞桿、舉升油缸缸筒、舉升油缸活塞桿等構(gòu)件組成。以某ZL20裝載機(jī)為例,采用SolidWorks軟件對(duì)裝載機(jī)工作裝置組成零件進(jìn)行三維建模,然后以前車架為基礎(chǔ)進(jìn)行虛擬樣機(jī)模型裝配。在鏟斗和動(dòng)臂、鏟斗與拉桿、拉桿與下?lián)u臂、上搖臂與轉(zhuǎn)斗油缸活塞桿、轉(zhuǎn)斗油缸缸筒與前車架、舉升油缸活塞桿與動(dòng)臂、舉升油缸缸筒與前車架以及動(dòng)臂與前車架之間施加轉(zhuǎn)動(dòng)副約束;在轉(zhuǎn)斗油缸缸筒與轉(zhuǎn)斗油缸活塞桿、舉升油缸缸筒和舉升油缸活塞桿之間施加移動(dòng)副約束;車輪與地面的移動(dòng)用移動(dòng)副模擬。裝載機(jī)工作裝置二維裝配及運(yùn)動(dòng)仿真模型見圖1。

1.2仿真平臺(tái)
采用COSMOSMotion軟件為裝載機(jī)工作裝置的仿真研究平臺(tái)。COSMOSMotion是與Solidworks軟件無縫集成的全功能運(yùn)動(dòng)仿真軟件,可以對(duì)復(fù)雜機(jī)械系統(tǒng)進(jìn)行完整的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)仿真。COSMOSMotion軟件支持多種約束,包括轉(zhuǎn)動(dòng)副、移動(dòng)副、圓柱副、球面副、萬向節(jié)、螺紋副、平面副和固定約束,支持共點(diǎn)、共線、共面、平動(dòng)、平行軸、垂直等虛約束。COSMOSMotion可分別按位移、速度或加速度定義各種運(yùn)動(dòng),包括定值、步進(jìn)、諧波、樣條曲線和函數(shù)等運(yùn)動(dòng)。用COSMOSMotion可以建立各種復(fù)雜的實(shí)際系統(tǒng)的精確運(yùn)動(dòng)仿真模型,對(duì)運(yùn)動(dòng)仿真的結(jié)果,可以通過多種方式來研究,滿足用戶對(duì)運(yùn)動(dòng)仿真分析的各種需求。
1.3仿真工況
根據(jù)ZL20裝載機(jī)的實(shí)際工作情況設(shè)定工作裝置仿真時(shí)間為17s,開始鏟斗沿料堆底部插人時(shí)間3s;上翻轉(zhuǎn)裝滿鏟斗時(shí)間2s;動(dòng)臂液壓缸運(yùn)動(dòng)舉伸動(dòng)臂的時(shí)間6s;轉(zhuǎn)斗油缸反向運(yùn)動(dòng)卸載時(shí)間2s;工作裝置返回時(shí)間4s。
1.3.1添加約束
將在Solidworks中創(chuàng)建的ZL20裝載機(jī)工作裝置按照部件間的運(yùn)動(dòng)關(guān)系添加約束,各構(gòu)件間除活塞桿與缸筒、車輪與地面添加移動(dòng)副外,其他構(gòu)件間添加轉(zhuǎn)動(dòng)副。
1.3.2施加運(yùn)動(dòng)
模擬裝載機(jī)采用一次單獨(dú)鏟掘法工作。裝載機(jī)用1擋直線前進(jìn),行駛速度一般在2.5~4.0km/h內(nèi);鏟斗斗刃沿料堆底部插人.插人深度約為斗底長(zhǎng)度時(shí),裝載機(jī)停止前進(jìn);然后轉(zhuǎn)斗油缸運(yùn)動(dòng)向上翻轉(zhuǎn)鏟斗;翻轉(zhuǎn)鏟斗到位后,動(dòng)臂液壓缸運(yùn)動(dòng)舉伸動(dòng)臂;舉伸動(dòng)臂到位后,轉(zhuǎn)斗油缸反向運(yùn)動(dòng)使鏟斗卸載;最后工作裝置返回。采用COSMOSMotion內(nèi)嵌MSC.ADAMS系統(tǒng)提供的階躍函數(shù)STEP(TIME,t1,x1,t2,x2)來完成運(yùn)動(dòng)副驅(qū)動(dòng)的設(shè)定。
車輪與地面移動(dòng)副的運(yùn)動(dòng)函數(shù)為:STEP(TIME,0,0,3,300)
轉(zhuǎn)斗液壓缸的運(yùn)動(dòng)函數(shù)為:

動(dòng)臂液壓缸的運(yùn)動(dòng)函數(shù):

1.3.3施加載荷
采用一次單獨(dú)鏟掘法工作時(shí),鏟斗插入和鏟裝是順序進(jìn)行的,工作裝置所受的外載荷有插人阻力Fin,鏟取阻力Fsh,物料重力Fg,插人阻力和鏟取阻力依次達(dá)到最大值,物料重力不發(fā)生變化。工作裝置所受的外載荷為:
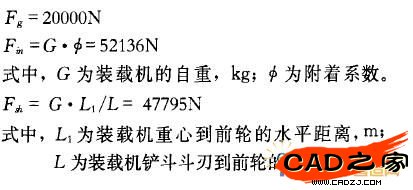
函數(shù)圖像如圖2所示
2工作裝置的仿真分析
設(shè)定好初始條件后,運(yùn)行仿真,對(duì)仿真的結(jié)果進(jìn)行分析如下。
2.1鏟斗平動(dòng)
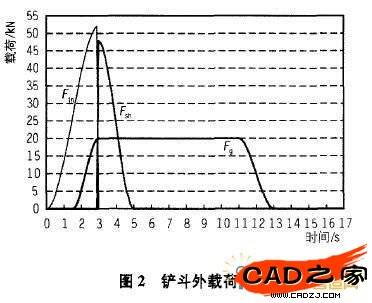
圖3為工作裝置鏟掘、舉升、降落時(shí)鏟斗擺動(dòng)角變化規(guī)律。為了避免物料散落,要求當(dāng)轉(zhuǎn)斗油缸閉鎖,動(dòng)臂油缸使動(dòng)臂舉升時(shí),連桿機(jī)構(gòu)能使鏟斗接近平動(dòng),其擺動(dòng)角≤15°。圖中在5~11s動(dòng)臂舉升這段曲線匕鏟斗仁翻角在-20.5°~-1.5°范圍變化。在5-6.5s范圍內(nèi)擺動(dòng)角不滿足要求,其它時(shí)間段擺動(dòng)角均滿足要求。說明動(dòng)臂在舉升開始時(shí),鏟斗的運(yùn)動(dòng)不是平動(dòng),裝載的物料有散落,其它過程中鏟斗基本保持水平。因此可以對(duì)工作裝置6桿機(jī)構(gòu)進(jìn)行調(diào)整優(yōu)化,以滿足鏟斗平動(dòng)性要求。
2.2工作裝置傳動(dòng)角
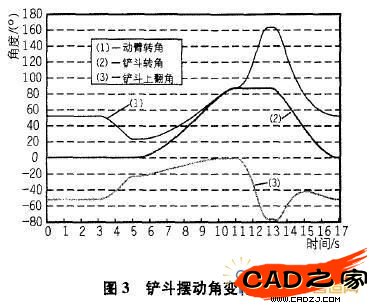
圖4為工作裝置在作業(yè)過程中連桿與鏟斗傳動(dòng)角、動(dòng)臂油缸對(duì)動(dòng)臂傳動(dòng)角、轉(zhuǎn)斗油缸對(duì)搖臂傳動(dòng)角、搖臂對(duì)連桿傳動(dòng)角的變化曲線,圖中可以看出它們對(duì)應(yīng)的最小傳動(dòng)角分別為22.3°(5s),25.50(11~13s),42.7°(13s)和23.4°(13s),都符合傳動(dòng)角大于10°的要求除連桿與鏟斗傳動(dòng)角外,其它最小傳動(dòng)角的發(fā)生位置均在卸載結(jié)束后。說明該裝載機(jī)工作裝置動(dòng)力設(shè)計(jì)是合理的,滿足設(shè)計(jì)的要求。
2.3油缸受力
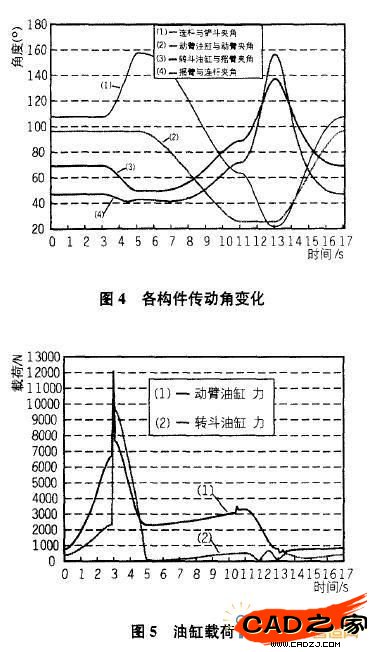
圖5為轉(zhuǎn)斗油缸活塞桿和動(dòng)臂油缸活塞桿在作業(yè)過程中的受力變化。可以看出在1~3s鏟斗插入料堆時(shí),轉(zhuǎn)斗油缸和動(dòng)臂油缸受力變化趨勢(shì)基本一致,隨著鏟斗鏟掘深度的增加而增加,此時(shí)轉(zhuǎn)斗油缸和動(dòng)臂油缸的閉鎖力分別為2340N和6728N;鏟斗插人料堆完成后,鏟斗翻轉(zhuǎn),在3s時(shí)達(dá)到了最大值,此時(shí)轉(zhuǎn)斗油缸的主動(dòng)力為11270N,動(dòng)臂油缸的閉鎖力12074N,鏟掘完成后作用力迅速下降;在5~11s動(dòng)臂重載舉升過程中,作用力基本平穩(wěn),最大舉升力為3292N;在鏟斗翻轉(zhuǎn)卸載時(shí),轉(zhuǎn)斗油缸作用力出現(xiàn)了突變點(diǎn),卸載完后,作用力下降。
通過上述仿真分析,完成了裝載機(jī)工作裝置的性能評(píng)價(jià)。根據(jù)仿真的數(shù)據(jù)變化以及模型的運(yùn)動(dòng),了解所設(shè)計(jì)ZL20裝載機(jī)工作裝置的綜合性能,其結(jié)果可以用來修改完善設(shè)計(jì)方案,使設(shè)計(jì)的裝載機(jī)工作裝置性能得到提高,所使用的仿真方法對(duì)裝載機(jī)工作裝置設(shè)計(jì)具有重要的參考價(jià)值。
相關(guān)文章
- 2020-12-19AutoCAD 、SolidWorks實(shí)體仿真建模與應(yīng)用解析 [芮勇勤
- 2013-03-04反鏟式挖掘機(jī)運(yùn)動(dòng)仿真(有模型、動(dòng)畫、參數(shù)設(shè)置、包絡(luò)圖
- 2011-09-01仿古建筑二層門市施工圖 中國(guó)古建圖紙
- 2011-04-11仿古建筑施工圖
- 2011-04-11仿古清式公建建筑圖
- 2011-04-05仿清式歇山古建(微縮新華門)設(shè)計(jì)施工圖
- 2011-03-09帶式輸送機(jī)動(dòng)力學(xué)及其計(jì)算機(jī)仿真的研究
- 2011-03-07仿古辦公樓建筑CAD詳圖經(jīng)典實(shí)例
- 2011-03-07仿古廁所CAD圖紙免費(fèi)下載
- 2011-03-07仿清式歇山古建(微縮新華門)cad設(shè)計(jì)施工圖